

(see Walking Cycle Picture )
{kind=link}
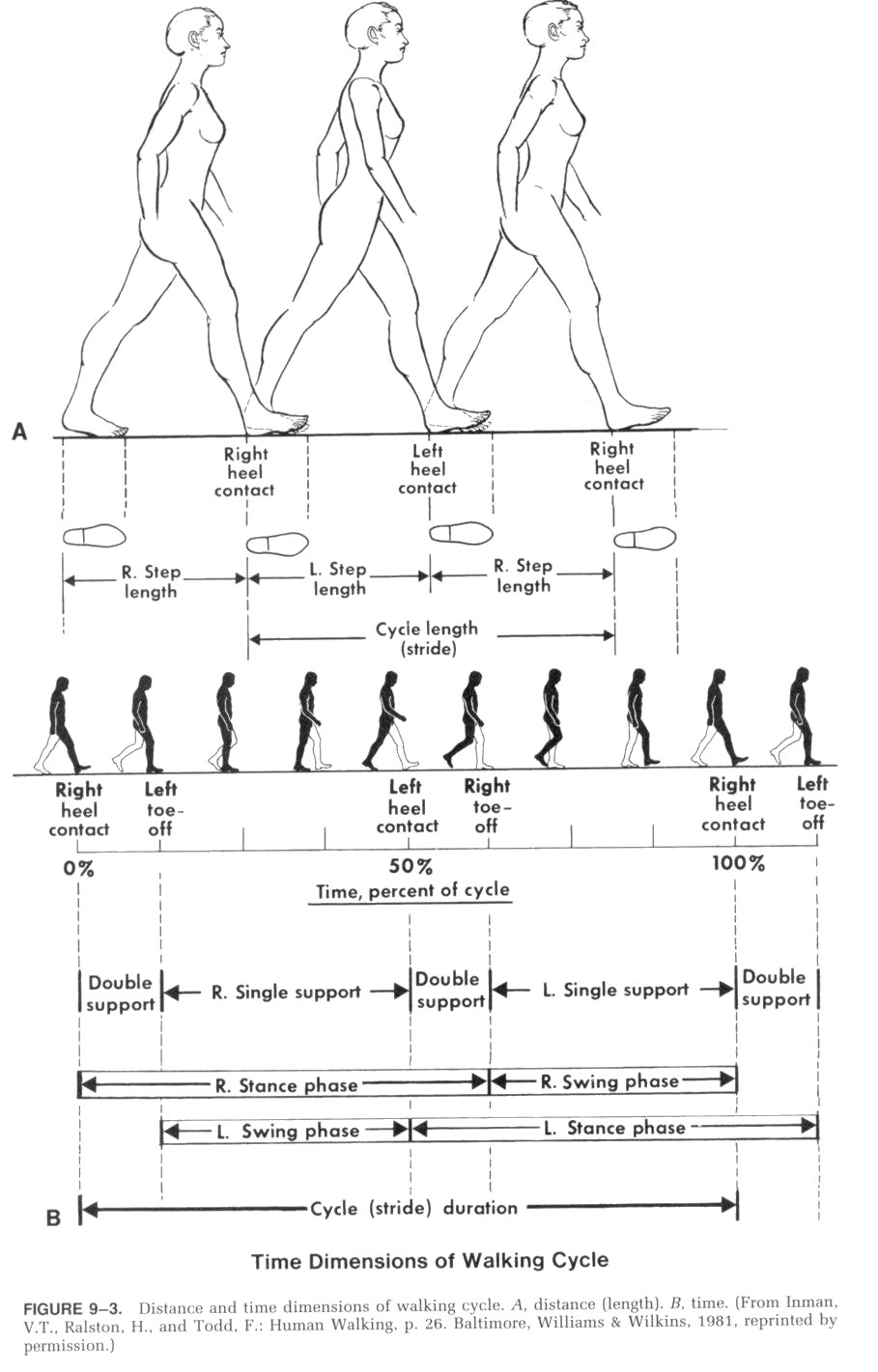
Step = The advancement of a single foot
Stride = The advancement of both feet (one step by each side of your body.)
Step length = longitudinal distance between 2 feet
Stride length = distance covered during 1 cycle = 2 step lengths
Velocity = stride length/cycle time (m/s)
Cadence = steps /minute
Double support = both feet on ground
Float phase = neither foot is on the ground
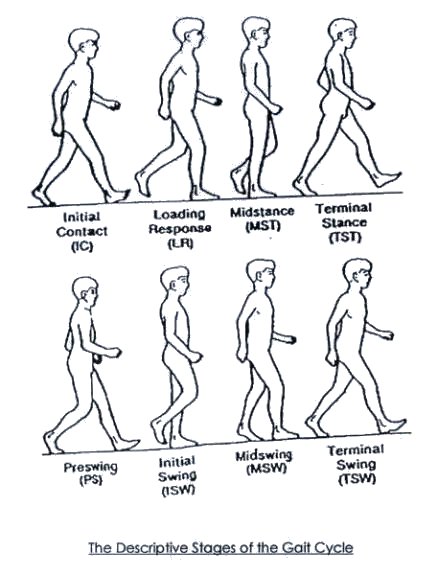
Gait has been divided into eight descriptive stages for the purpose of assessment, this is obviously an artificial division as these are all points within a moving continuum, however it is a useful way of providing reference points for comparisons to be made
Normal Gait
Cycle begins when foot strikes the ground and ends when it strikes the ground again
Stance phase:
Heel strike to toe off
60% gait cycle
2 periods of double stance 10% each -at these times the body's centre of gravity is at its lowest
Divided into 5 phases:
Initial contact
at initial contact, the knee is extended and the ankle is neutral (or slightly plantarflexed)
Normally, the heel contacts the ground first (in patients with pathological gait patterns, the entire foot or the toes contact the ground initially)
Loading response
Loading response corresponds to the gait cycle's first period of double limb support & ends with contralateral toe off , when the opposite extremity leaves the ground.
during loading, knee flexes 15 deg while ankle plantarflexes 15 degrees, which is an energy-conserving mechanism
throughout first phase of stance, hamstrings and ankle dorsiflexors remain active
quadriceps and gluteal muscles act during loading and throughout early midstance to maintain hip and knee stability
Midstance
begins with contralateral toe off and ends when the center of gravity is directly over the reference foot
by midstance the knee is extended & ankle is neutral again
the triceps surae acts to control tibial advancement (preventing the tendency for the tendency for the ankle to dorsiflex due to body wt and inertia)
Terminal stance
begins when the center of gravity is over the supporting foot and ends when the contralateral foot contacts the ground
Terminal stance & midstance are the only phases when the centre of gravity truly lies over the base of support.
Pre-swing
begins at contralateral initial contact and ends at toe off
preswing corresponds to the gait cycle's second period of double limb support
at preswing, knee flexes 35 degrees & ankle plantarflexes 20 degrees
in these last phases of stance, the toes, which have been neutral, dorsiflex at the metatarsophalangeal joints;
Swing phase:
40% gait cycle
during swing, the ankle dorsiflexes by the concentric contraction of anterior tibialis muscle; all other muscles are silent
sub-talar joint assumes near neutral position, & toes dorsiflex slightly as foot prepares for next period of stance
Initial swing
begins at toe off and continues until maximum knee flexion (60 degrees) occurs
contraction of the quadriceps, initiated before toe off, serves two purposes
it prevents heel from rising too high in a posterior direction
it helps to initiate the forward swing of the leg
Mid-swing
from maximum knee flexion until the tibia is vertical or perpendicular to the ground
Terminal swing
begins where the tibia is vertical and ends at initial contact.
hamstrings muscles become active to decelerate forward swing of the leg and thereby control the position of the foot at heel strike
Distance & Time Dimensions of Walking Cylcle (Picture)
Running:
the two periods of double support are replaced by periods of double float
Stance time less than swing time
1. Stability of Stance
compromised in cerebral palsy by- Abnormal foot position in stance, poor balance d.t. loss of trunk/ lower limb motor control
2. Foot clearance in swing
compromised in CP by decr. knee motion, ankle DF
3. Step length
compromised in CP by knee extensors, unstable foot in stance, weak PF at push off
4. Pre-positioning for initial contact
compromised in CP by foot position in stance
5. Energy conservation
Newton's third law states that every action must have an equal and opposite reaction, therefore the downward force passing through the foot when it bears weight must be matched by an equal and opposite upward force. This force may pass in front or behind the hip and knee and so act as either a flexor or extensor force, the direction of its action in relation to the joints being dependent on the joint positions and normally varies through the gait cycle. If the joint positions or the cadence of the gait are altered from normal then the effect of this force may be changed.
In normal gait the ground reaction force (GRF) passes anterior to the hip and knee until just before toe off. This therefore produces an extensor force reducing which acts to reduce the work required from quadriceps during the stance phase. During terminal stance and preswing the force passes behind the hip and knee and acts as a flexor so reducing the work requirement for hip and knee flexion.
It anything prevents this normal progression it will therefore increase the energy expenditure required. This effect can be illustrated by considering the effect of excessive heel cord lengthening, weakening plantar flexion thus causing the foot to be dorsiflexed when weight bearing. In this scenario the GRF passes posterior to the knee and anterior to the hip for almost the whole gait cycle, tending to produce a crouch posture that can only be resisted by muscle action. Once this is established the further the crouch deepens the greater the force tending to produce it becomes; as cerebral palsy often causes weakness as well as spasticity this may be sufficient to prevent walking.


Normal gait is very energy efficient, in addition to the way that ground reaction force acts to reduce work, accurate control of muscles allows energy to be stored in them by the use of eccentric contracture. This effect can be illustrated with regard to the ankle. Perry described ankle movement in terms of three stages or rockers, the second being that time from the foot being placed flat on the ground until heel lift off. During the forward progression of the tibia triceps surae undergoes eccentric contracture storing energy within the muscle. This effect also occurs at other muscles, Gage attributing this particularly to the biarticular muscles, reduction in control of these, in particular spasticity, reduces this effect, increasing work requirement.
Much of kinetic energy for swinging limb is provided by inertia, which is augmented by the plantarflexors (85%) and hip flexors (15%). Energy is conserved by minimizing movements of center of gravity of body, by controlling momentum, and by transfer of energy between body segments.
Loss of normal limb positioning may again act to disadvantage muscle action. This effect can be illustrated by the effect of external rotation at the foot. As the movement at the ankle can be considered to be around a fulcrum sited at the talar dome, the force produced by tricips surae can be resolved into extension and valgus components. Normally as the axis of the foot is close to the line of progression of the body the valgus component is small, however as the foot externally rotates and this increases, there is a concomitant decrease in the extensor moment. This means that for a given power of toe for an increased workload is required.
Also See : Foot & Ankle Mechanics Gait Abnormalities
Foot & Ankle Mechanics
Gait Abnormalities
Foot & Ankle Mechanics
Gait Abnormalities
Foot & Ankle Mechanics
Gait Abnormalities
Tidak ada komentar:
Posting Komentar